
Year
Fall 2022
Category
robotics, research, digital fabrication
My main research focus is cooperative robotics, at the intersection of human labor and digital fabrication. For my final thesis project of my M. Arch. degree, I created two assemblies to show the power of cooperative robotics. The first assembly is a statuette of a left hand and the second is a mathematical surface known as a gryoid egg.
The basic process I used to create these assemblies is to first create a 3D model of an object. Second, I use the Kangaroo plugin for Grasshopper to circle-pack the surface of the object. Third, I use KUKA|PRC to turn these circles into instructions for our KUKA KR-60 robots to follow. Finally, I execute the program line-by-line on the robot. The robot positions each disc into its propert location and I manually attach them to one another with glue.

Assmbling the gyroid one piec at a time was rewarding but very time consuming.

Finished shot of the hand, made out of cardboard circles.
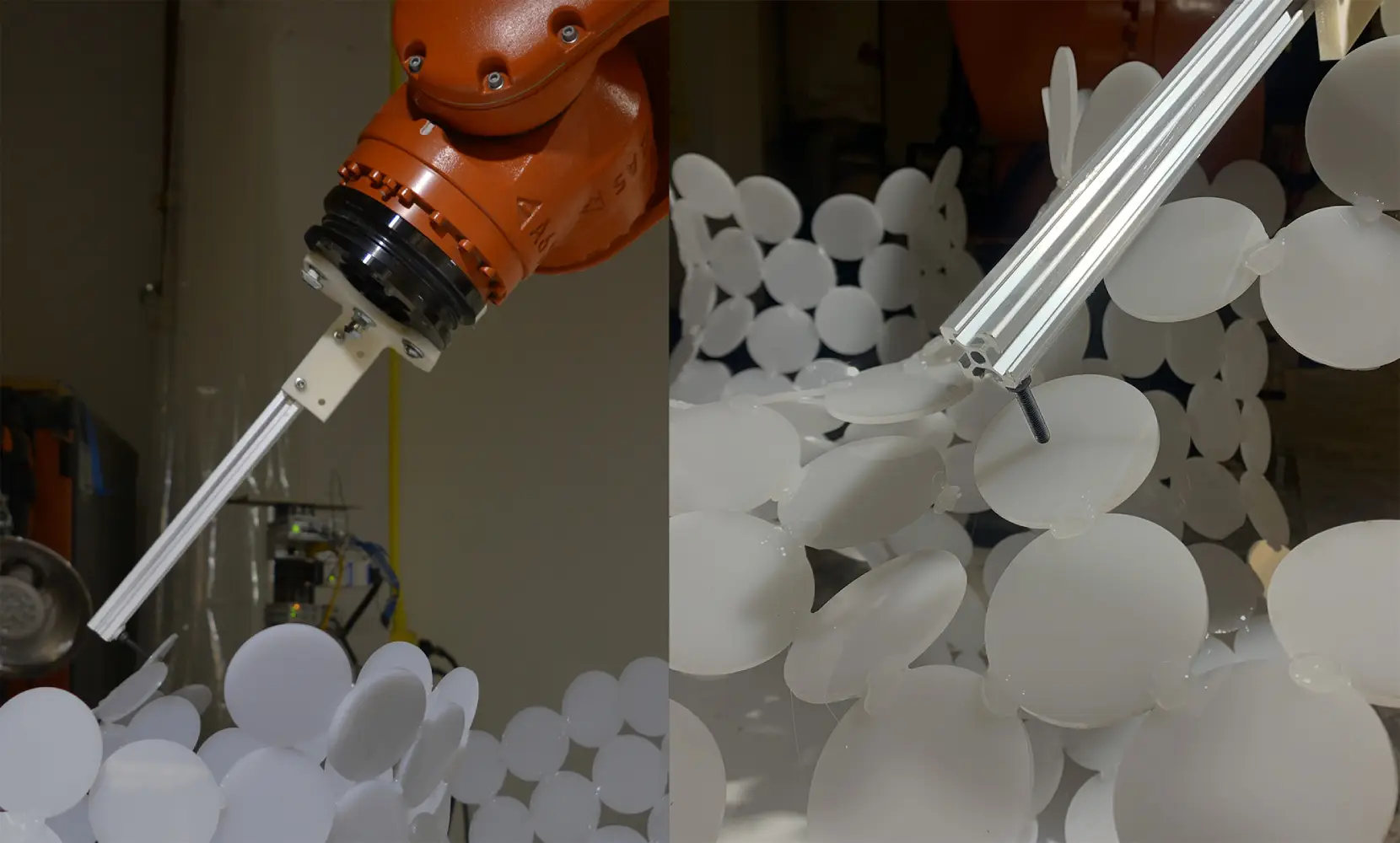
Close-up of the robot with end effector placing acrylic discs
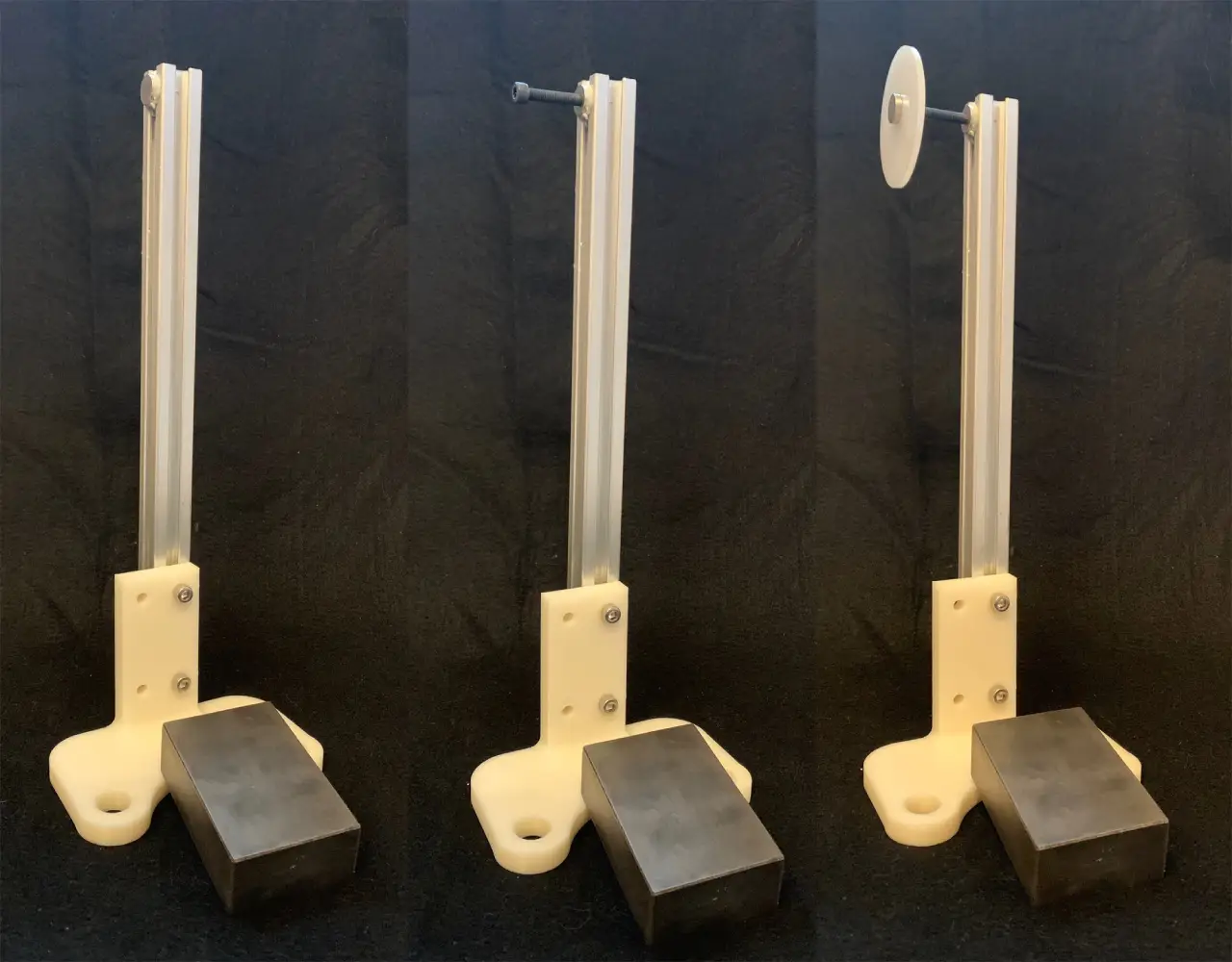
3D printed end effector

More photos of the cardboard hand assembly.

Gyroid egg, made out of laser cut acrylic discs

Each cardboard disc had a small dot that indicates its center.